date: 2024-04-02
title: DAA-Assignment-1
status: DONE
author:
- AllenYGY
tags:
- DAA
- Assignment
created: 2024-04-02T17:07
updated: 2024-04-08T13:35
publish: TrueDAA-Assignment-1
Question 1
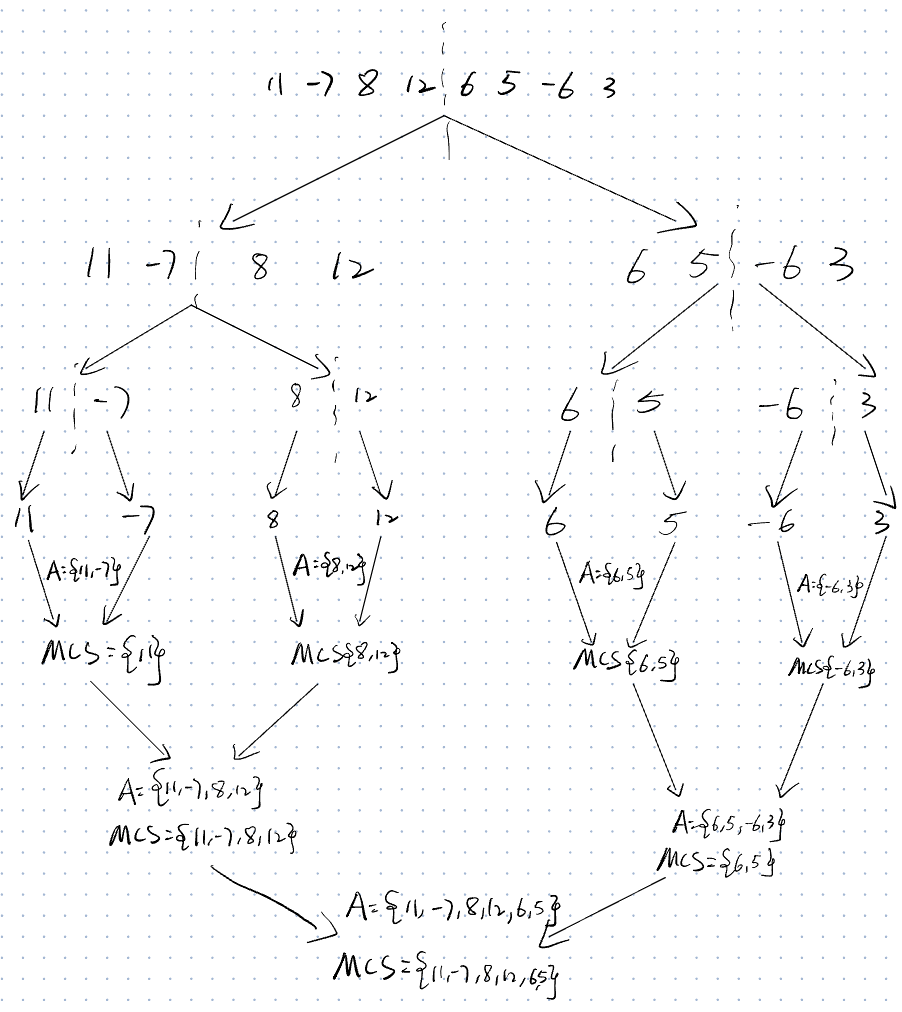
Given the input A=[11, -7, 8, 12, 6, 5, -6, 3] , track the divide-and-conquer algorithm to find the maximum contiguous subarray. You need to show the recursive calls as a tree. The input and output for each recursive call should also be indicated as well.
- Input: A=[11, -7, 8, 12, 6, 5, -6, 3]
- Output: MCS of A
Algorithm Maximum Contiguous Subarray Problem
if i=j then
return R[i]
else
s1←MCS(R,i,⌊(i+j)/2⌋)//Using floor function for lower rounding
s2←MCS(R,⌊(i+j)/2⌋+1,j)
A←MaxSuffix(R,i,⌊(i+j)/2⌋)+MaxPrefix(R,⌊(i+j)/2⌋+1,j)
return MAX(s1,s2,A)
end if
Question 2
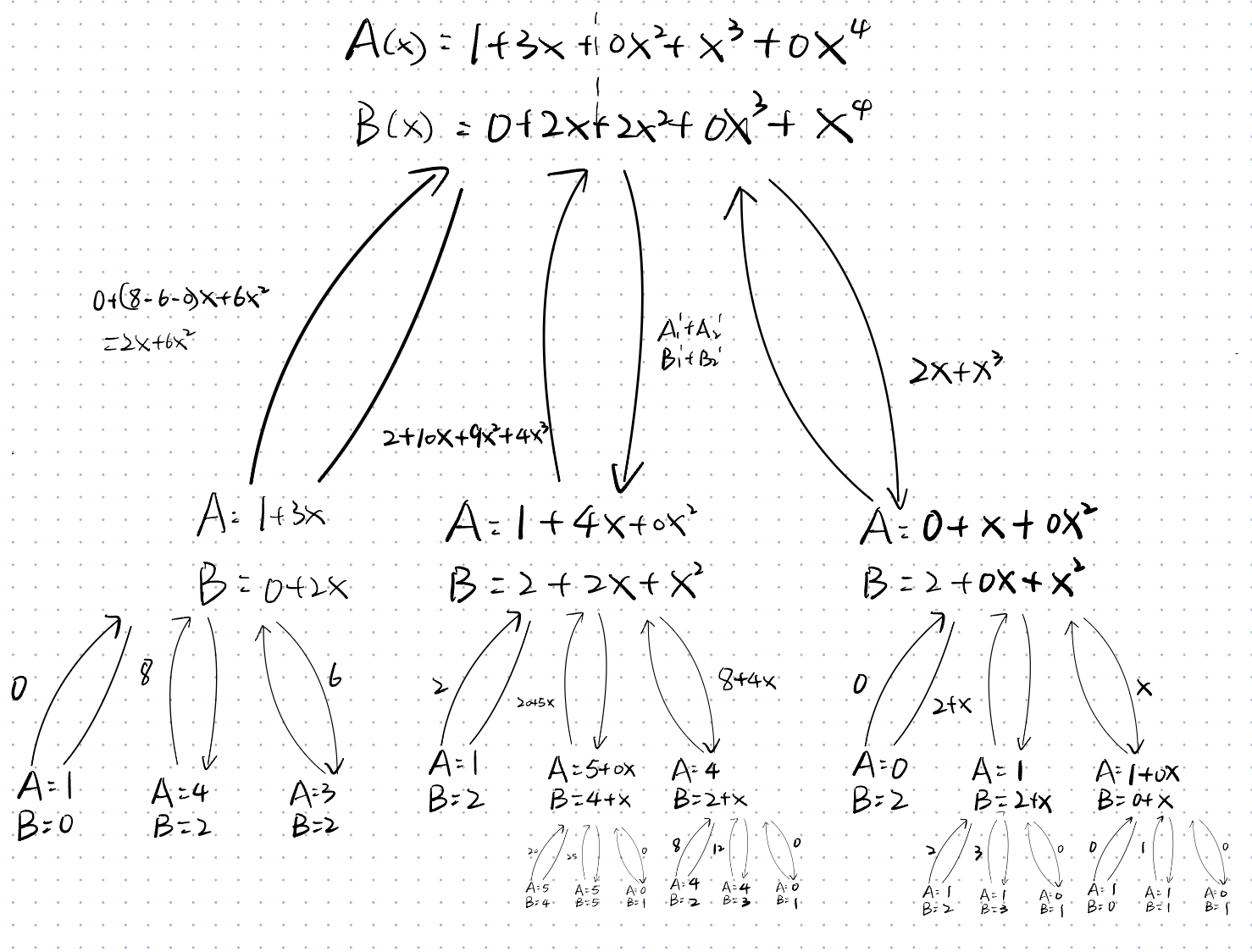
Given two polynomials
- Input: Two polynomials A(X) and B(x) of order n
- Output: The polynomial C(X) = A(x)B(x)
Algorithm Polynomial Multi2(A(x),B(x))
if n=0 then
return a0×b0
else
A0(x)=a0+a1x+⋯+a⌊2n⌋−1x⌊2n⌋−1
A1(x)=a⌊2n⌋+a⌊2n⌋+1x+⋯+anxn−⌊2n⌋
B0(x)=b0+b1x+⋯+b⌊2n⌋−1x⌊2n⌋−1
B1(x)=b⌊2n⌋+b⌊2n⌋+1x+⋯+bnxn−⌊2n⌋
Y(x)=PolyMult2(A0(x)+A1(x),B0(x)+B1(x))
U(x)=PolyMult2(A0(x),B0(x))
Z(x)=PolyMult2(A1(x),B1(x))
return U(x)+(Y(x)−U(x)−Z(x))x⌊2n⌋+Z(x)x2⌊2n⌋
end if
Question 3
In the deterministic linear-time divide-and-conquer algorithm taught in class for the selection problem, the input array is divided into groups of 5 elements. Analyze the running time of the algorithm if the input array is divided into groups of 7. Does your algorithm run in linear time?
The Algorithm is still run in linear time
Algorithm Deterministic-Select(A,p,r,i)
if p=r then
return A[p]
end if
q=Deterministic−Partition(A,p,r)
k=q−p+1
if i=k then
return A[q]
end if
if i<k then
return Deterministic−Select(A,p,q−1,i)
end if
if i>k then
return Deterministic−Select(A,q+1,r,i−k)
end if
Assume always Deterministic-Select Right (wlog)
Proof
Base case: When
Question 4
A segment is a pair of positive integers
Given a sequence of
Describe your algorithm in a high-level presentation.
- Input:
- Segments a sequence of
- Left to indicate left endpoint
- Right to indicate right endpoint
- R to indicate r (
- Segments a sequence of
- Output:
- Boolean value indicating whether there is at least one pair of intersecting segments.
- If the left and right indexes coincide, the intersect cannot be found. Return false;
- Divide the array into two halves: the left sublist and the right sublist.
- Recursively apply the algorithm to the left sublist to check for intersections.
- Recursively apply the algorithm to the right sublist to check for intersections.
- If any recursive call finds an intersection, return 'true' because we have already found the intersecting segments.
- Otherwise look for MaxLeftB in the left sublist and MinRightA in the right list
- If MinRightA is less than MaxLeftB, intersect is found
- Otherwise return 'false'.
Write down the pseudo code.
Algorithm Check for Intersection in Segments
function DoesIntersect(Segments, Left, Right, R)
if Left≥Right then
return false
end if
Mid←⌊(Left+Right)/2⌋
LeftIntersect← DoesIntersect(Segments, Left, Mid, R)
RightIntersect← DoesIntersect(Segments, Mid+1, Right, R)
if LeftIntersect or RightIntersect then
return true
end if
MaxLeftB← FindMaxB(Segments, Left, Mid)
MinRightA← FindMinA(Segments, Mid+1, Right)
if MaxLeftB>MinRightA then
return true
end if
return false
end function
function FindMaxB(Segments,Left,Mid)
MaxB←−∞
for i←Left to Mid do
MaxB←max(MaxB,Segments[i].b)
end for
return MaxB
end function
function FindMinA(Segments,Mid,Right)
MinA←∞
for i←Mid+1 to Right do
MinA←min(MinA,Segments[i].a)
end for
return MinA
end function
Analyze the time complexity of your algorithm.
When
Question 5
Assume: The number of terms in the polynomials is always an integer power of
In other words,
Define a method to convert polynomials in general to polynomials whose number of terms is an integer power of 2.
- If the number of terms of the polynomial is not a power of two
- Then by adding the number of terms to the polynomial until the number of terms becomes a power of two, the coefficient of the added term is 0
Discuss the consequence by doing so. Does it increase the time complexity comparing to the original algorithm? Why?
Hint: please pay attention to the input size
- Input: Two polynomials
- Output: The polynomials
Algorithm PolyMulti(A(x),B(x))
A′(x)=M(A(x))
B′(x)=M(B(x))
return GPolyMultic(A′(x),B′(x))
It will not increase the time complexity comparing to the original algorithm.
The time cost will slightly increase.
Suppose there are 2 polynomials with
After the operation it now turn to
In original algorithm the time complexity is
Now the time complexity is
There are almost the same time complexity