date: 2024-09-06
title: "Signal and Image Processing"
status: DONE
author:
- AllenYGY
tags:
- NOTE
- ComputerVision
publish: TrueSignal and Image Processing
2D images and formation
from matplotlib import pyplot as p
import numpy.random as r
I = r.rand(256,256)*0.5;
p.imshow(I ,cmap='gray', vmin=0.0,vmax=1.0);
p.show();
Tip
rand(256,256)生成一个 256x256 的随机矩阵, 值在 0-1 之间cmap = 'gray'表示使用灰度图显示vmin和vmax分别表示最小值和最大值matplotlib.pyplot.imshow()函数用于显示图像, 一般可以自动数值normalize到 0-1 之间vmin和vmax可以指定normalize的范围
Dimensionality of an Image
8 bit image: 256 gray levels
- e.g. 256x256 = 65,536 pixels
- 256 values ^ 65,536 pixels = 256^65,536
Image: 2D sampling of signal
- Signal: function depending on some variable with physical meaning.
- Image: sampling of that function.
- 2 variables: xy coordinates
- 3 variables: xy + time (video)
- ‘Brightness’ is the value of the function for visible light
- Can be other physical values too: temperature, pressure, depth …
- 信号不仅限于亮度,还可以表示其他物理量。例如,红外图像可以表示温度,海洋探测图像可以表示深度,气象图像可以表示压力等。
Sampling
Sampling in 1D
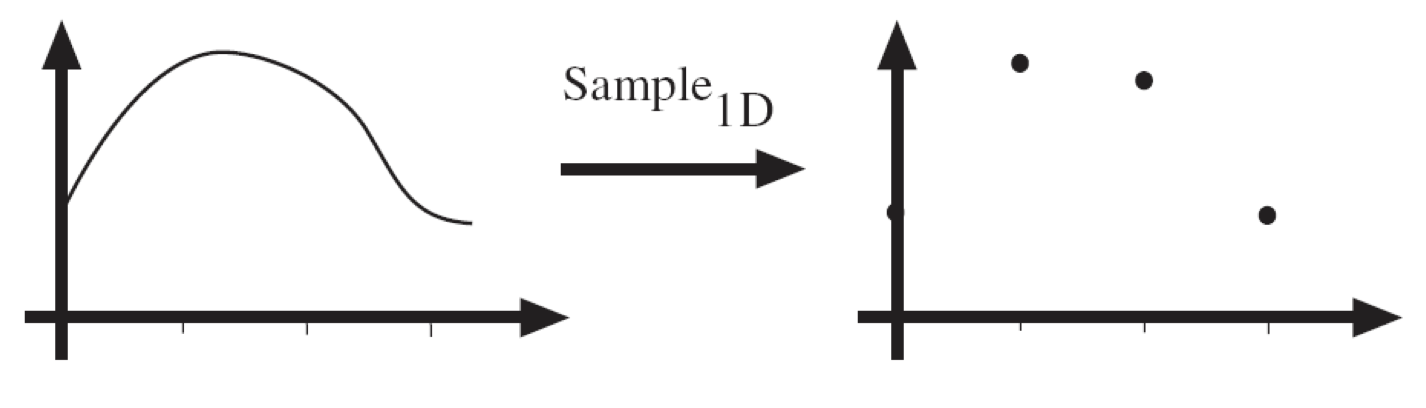
- Sampling in 1D takes a function and returns a vector whose elements are values of that function at the sample points.
等间隔采样
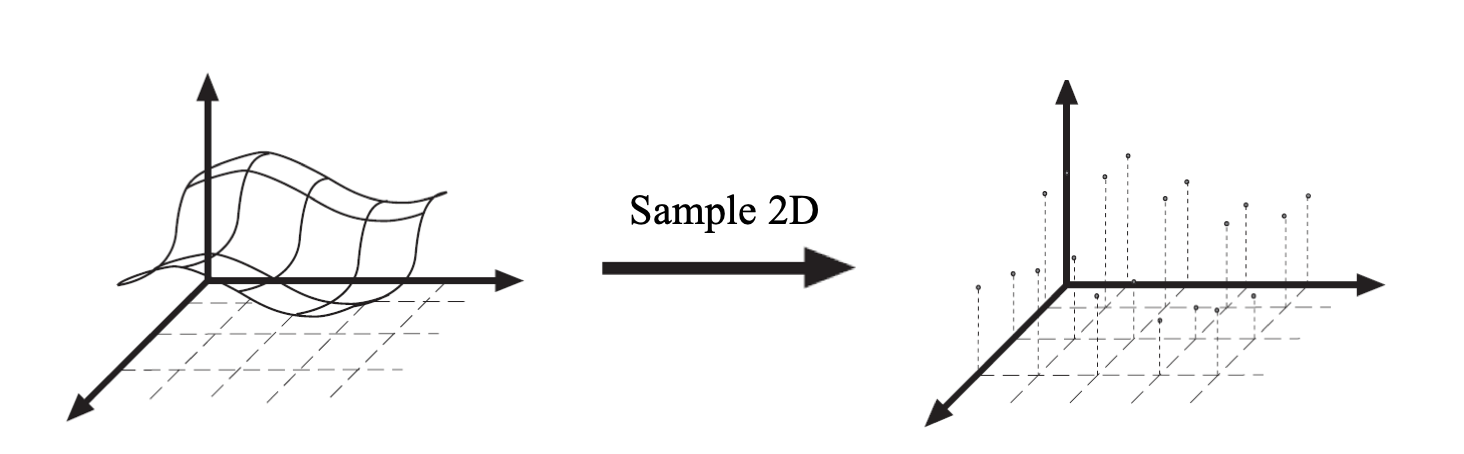
Sampling in 2D
- Sampling in 2D takes a function and returns a matrix.
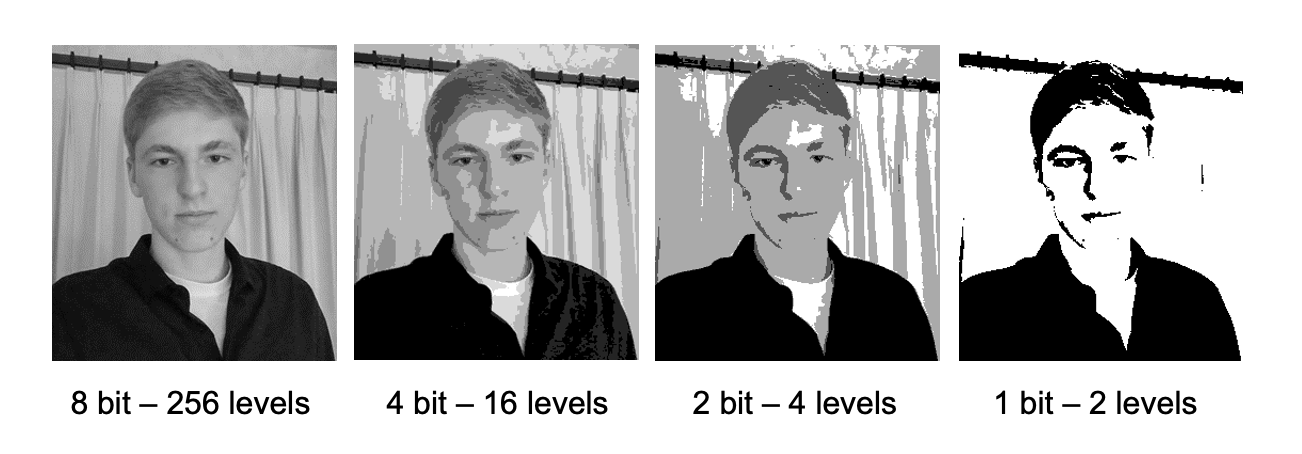
Quantization
- Digital values – integer values
- Quantization is lossy!! After quantization, the original signal cannot be reconstructed anymore
- In contrast to sampling, as a sampled but not quantized signal can be reconstructed.
- Simple quantization uses equally spaced levels with k intervals
量化是一种将连续信号转换为离散值的过程。在简单量化中,整个信号的范围会被均匀地划分为 k 个区间(或称为级别)。这些区间之间的间隔是相同的,因此称为“等间隔”。每个信号的值都会被映射到其对应的区间,最终得到的是有限的离散值,而不是连续的信号。
Quantization Effects – Radiometric Resolution
Spatial Linear Filters
Four views of filtering
- Image filters in spatial domain
- Image filters in the frequency domain
- Image filters in the temporal domain
- Image pyramids
Image filters in spatial domain
- Filter is a mathematical operation of a grid of numbers
- Smoothing, sharpening, measuring texture
- 平滑、锐化、测量纹理
Box filter
系数
- Usages
- Enhance images
- Denoise, resize, increase contrast, etc.
- Extract information from images
- Texture, edges, distinctive points, etc.
- Detect patterns
- Template matching
- Enhance images
Sobel filter
-
用于边缘检测
-
Check horizontal edge 横边
- Check Vertical edge 竖边
相当于计算两侧的差值,差值越大,当前位置是边缘
Correlation and Convolution
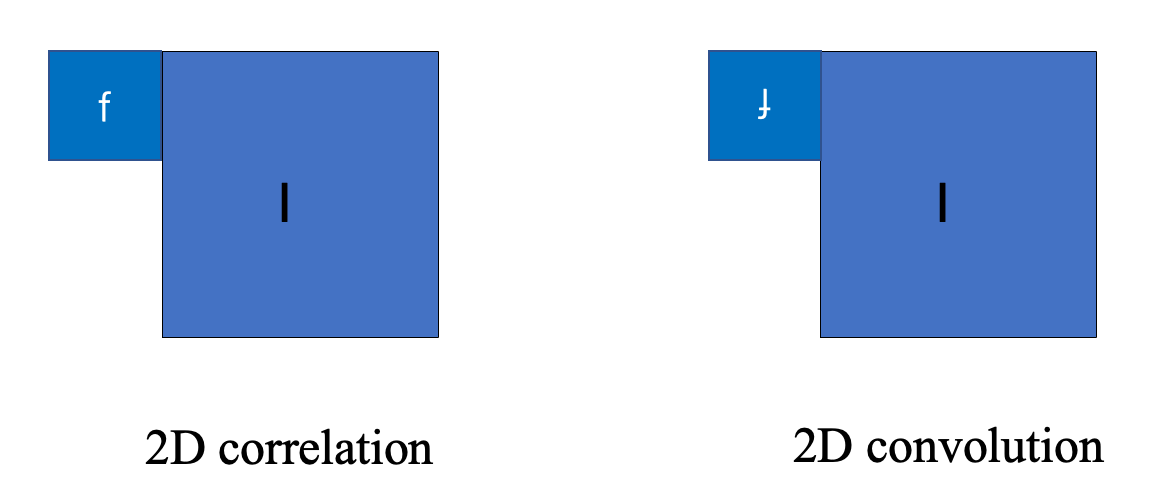
Correlation
h=scipy.signal.correlated2d(f,I)
Convolution
h=scipy.signal.convolve2d(f,I)
- Convolution is the same as correlation with a 180° rotated filter kernel.
- Correlation and convolution are identical when the filter kernel is symmetric.
卷积与相关的关系:
- 卷积可以看作是相关的一种变体,唯一的区别是卷积中的滤波器会先进行180度的旋转。
- 当滤波器是对称的时,卷积和相关是相同的。这是因为旋转180度不会改变滤波器的形状。
Properties of linear filters
Linearity
线性滤波器的线性性意味着,对于输入图像 I 以及两个滤波器 f_1 和 f_2 ,对图像应用滤波器的结果等于先将滤波器相加,再应用一次滤波,或者分别应用每个滤波器,再将结果相加。
换句话说,滤波操作对滤波器的加法是可交换的,可以直接作用于滤波器的线性组合。
Shift invariance
平移不变性指的是滤波器的输出与像素位置无关,意思是无论图像中的像素在什么位置,滤波器对强度的操作结果都是相同的。也就是说,滤波器的应用不会因为图像的某个区域平移而改变输出。
在公式中,如果我们先将滤波器 f 平移,再对图像 I 进行滤波,这与先对图像 I 进行滤波,然后再平移滤波结果是等价的。
Any linear, shift-invariant operator can be represented as a convolution.
Convolution properties
1. Commutative
- Conceptually no difference between filter and signal
- But particular filtering implementations might break this equality
2. Associative
- Often apply several filters one after another:
- This is equivalent to applying one filter:
3. Distributes over addition
4. Scalars factor out
5. .Identity unit impulse
Gaussian filter
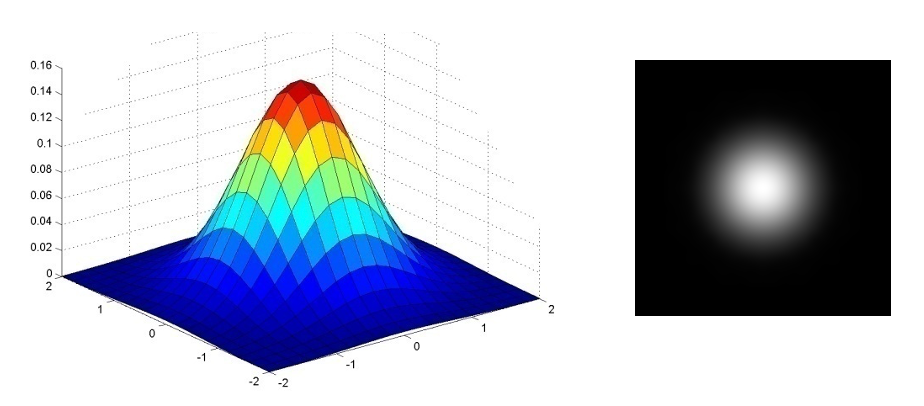
Property
- Remove high-frequency components from the image (a low-pass filter)
- Images become more smooth
- Gaussian convolved with Gaussian is another Gaussian
- Separable kernel
- Factors into product of two 1D Gaussians
Match Object
Subtract the median
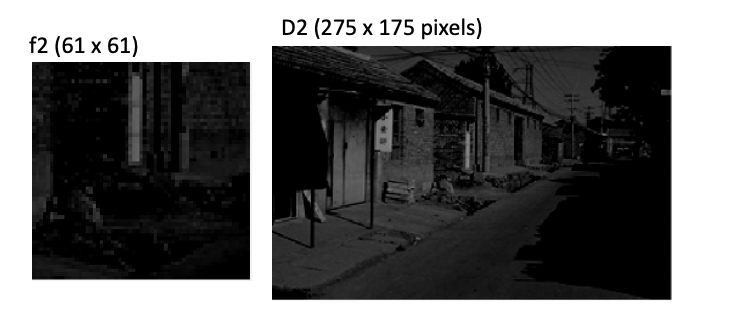
f = D[ 57:117, 107:167 ]
f2 = f – np.mean(f)
D2 = D – np.mean(D)
I2 = correlate2d( D2, f2, 'same' )
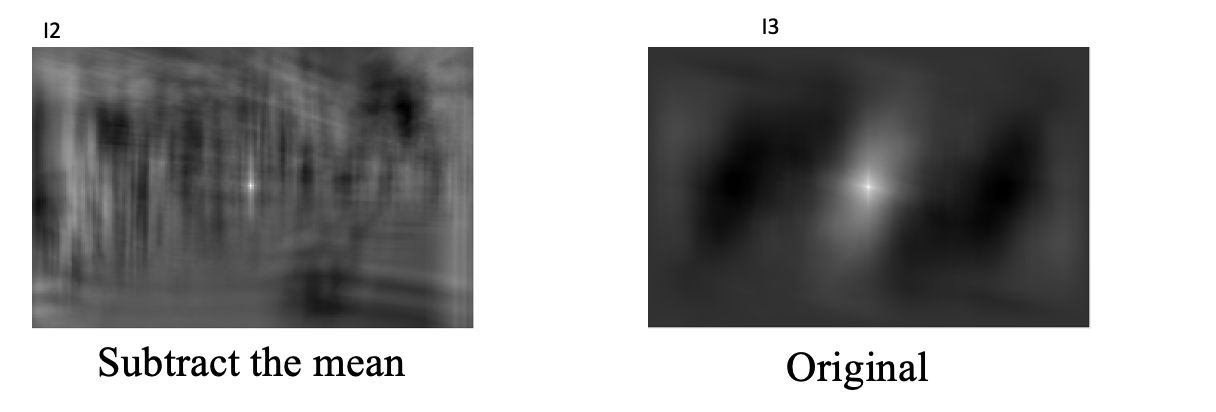
Now zero centered.
Score is higher only when dark parts
match and when light parts match.
通过将图像和子区域的均值归零,相关得分在模板的暗区和亮区与图像相应区域匹配时才会较高。这避免了只匹配亮度(而不考虑结构)的高得分情况。
Non-linear filters
Median filter & Mean filter
- Operates over a window by selecting the median intensity in the window.
- Rank filter as based on ordering of gray levels
- E.G., min, max, range filters
选择窗口内的中位数/平均数
中值滤波器:
- 能够保留图像的边缘和细节。
- 有效去除盐噪声和胡椒噪声。
- 对异常值有很好的鲁棒性。
均值滤波器:
- 会模糊图像边缘,平滑噪声和细节。
- 对极端噪声和异常值处理效果较差。